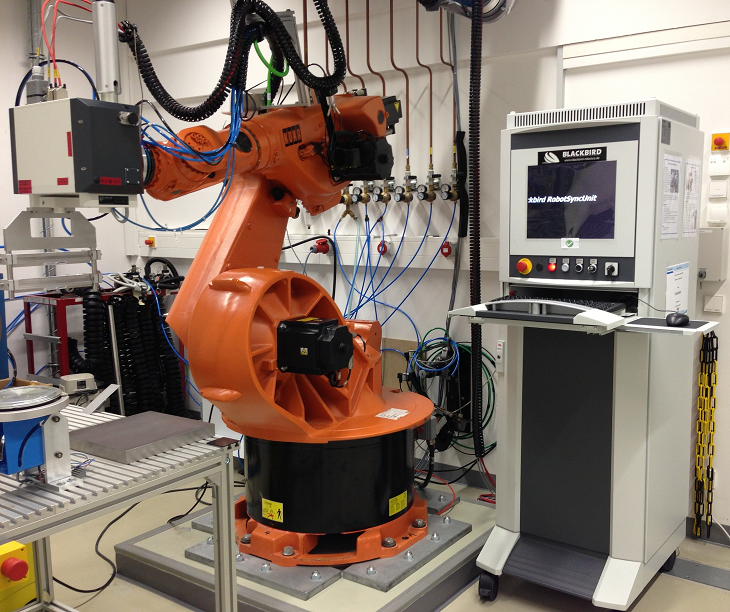
Anwendung
Das SWS - Scanner Welding System - ist ein System, welches die 6 Achsen des KR 30-2 und die 3 Achsen eines Scanners vereint, synchronisiert und ansteuert. So werden Roboterreichweite und Scannerpräzision und -schnelligkeit für die Lasermaterialbearbeitung auf das Vorteilhafteste kombiniert. Der Scanner ist über eine Faser mit einem 500 W Faserlaser verbunden. Die scannereigene Software und die Software der SWS-Steuerung ermöglichen den Import von CAD-Files, Konturdetektion und automatische Bahngenerierung, Vorschau und Simulation auf dem realen Bauteil und Synchronisation der Scanner- & Roboterbewegung. Das System synchronisiert bei einer On-the-Fly Anwendungen die Bewegung des Roboters mit den Spiegelbewegungen des Scanners.
Technische Daten
| Faserlaser: | |
| Typ | FL x50 |
| Hersteller | Rofin |
| Wellenlänge | 1070 nm |
| Ausgangsleistung max. | 500 W |
| 2 Faserausgänge | 100µm, 200µm |
| Fokusdurchmesser | 600µm (mit 200µm Faser) |
| 3D-Scanner + Teachhilfe: | |
| Typ | IntelliWeld 30 FC V |
| Hersteller | Scanlab |
| Kühlung | Wassergekühlt |
| Arbeitsabstand | 472mm |
| Arbeitsfeld | 260 x 260 mm |
| z-Achse | ±100 mm |
| Teachhilfe | 2 Laserdioden Fadenkreuze zur genauen Positionierung des TCP |
| Roboter: | |
| Typ | KR 30-2 C2 FLR |
| Hersteller | KUKA |
| Spezifikationen | siehe hier |